本篇文章主要讲述利用MATLAB Simulink中的Simscape Multibody(SimMechanics)模块对三自由度机械臂系统进行仿真。适用于同济大学机械原理课程设计课程(至少我那阵是做这个)。
📓题目
在 MATLAB / Multibody 环境中,实现 3 自由度机械臂运动仿真。
具体要求:
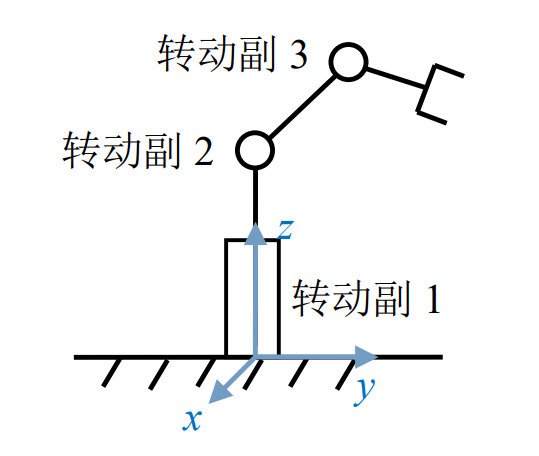
- 机械臂的 3 个关节均为转动副。基础坐标系的方向如下图所示,但基础坐 标系的原点位置可以任意选定。初始时刻第 1 个转动副的轴线沿基础坐标系 z 轴,第 2、3 个转动副轴线均沿基础坐标系 x 轴。
机械臂的杆件结构参数(包括杆件长度)自由设计;所建立的 Multibody 模型(可以在 Multibody 建模,也可以利用其它三维设计软件的 step 格式)要求 包含机械臂关节和末端执行器的细节结构。
机械臂在初始时刻的位置姿态自行确定;经过 5 秒,机械臂末端执行器沿直线运动到目标点:x=0.5m,y=0.6m,z=1.3m;5 秒之后,机械臂停留在目标点。
1️⃣机械臂仿真内容介绍
本题要求为:机械臂在初始时刻姿态自行确定;经过5s机械臂末端执行器沿直线运动到目标点x=0.5m、y=0.6m、z=1.3m,5s之后,机械臂停留在目标点。
为实现上述要求,相关解决方式及主要模块功能如下:
- 利用SolidWorks建立机械臂模型,并导出step格式,用File Solid模块导入到MATLAB中,其中,主要杆件的相关结构参数如下:
表1 Multibody(SimMechanics)模型杆件相关结构参数
| 参数 |
数值 |
| 转动副2回转中心到转动副1的距离L1 |
0.3m |
| 转动副2、3之间的距离L2 |
0.7m |
| 转动副3回转中心到夹持端夹持中心的距离L3 |
0.7m |
利用坐标变换(Rigid Transform)模块调整各杆件位置,机械臂初始位置为x=0,y=1.4m,z=0.3m;修改各转动副(Revolute Joint)模块参数,添加信号输入、输出端口,并连接PID模块以实现位置控制。
根据位置方程计算得位置反解函数,利用MATLAB Function模块编写运动学反解程序;利用Fcn模块、Clock时钟模块和Switch模块输入x,y,z与时钟变量u的关系,并实现运动状态的切换。
调试PID参数,以获得更加平稳、更接近直线轨迹的运动。
2️⃣机械臂仿真相关图片
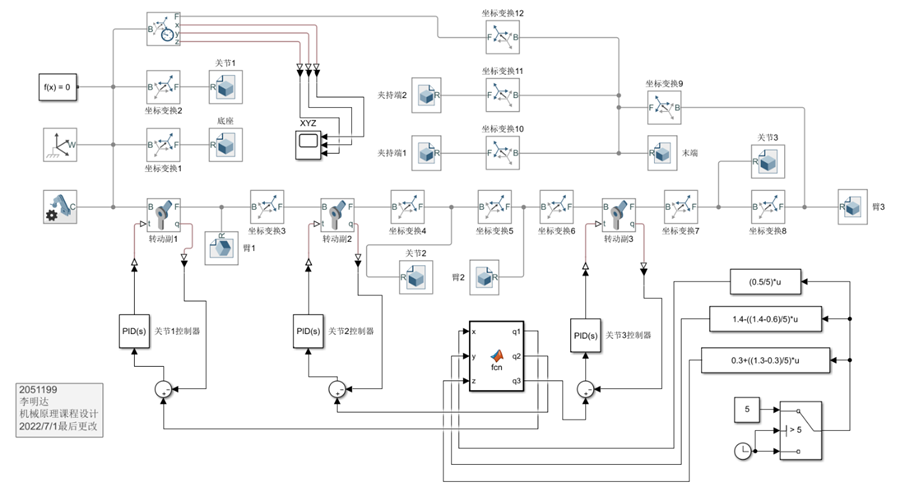
图1 Multibody(SimMechanics)模型图
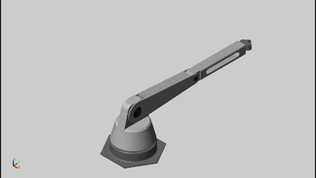
图2 机械臂初始时刻截图

图3 机械臂运动过程中截图

图4 机械臂到达目标点截图
3️⃣MATLAB程序片段
3.1 机械臂位置反解
1
2
3
4
5
|
syms L1 L2 L3 q1 q2 q3 x y u
eqn2 = L2*cos(q2)+L3*cos(q2+q3) == sqrt(x^2+y^2);
eqn3 = L2*sin(q2)+L3*sin(q2+q3) == u;
[q2 ,q3] = solve(eqn2, eqn3 ,q2, q3)
|
3.2 Multibody中机械臂位置反解模块
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| function [q1,q2,q3] = fcn(x,y,z)
L1 = 0.3;
L2 = 0.7;
L3 = 0.7;
u = z-L1;
q1 = -atan2(x,y);
q2 = 2*atan((2*L2*u - (L2^2*((L2^2 + 2*L2*L3 + L3^2 - u^2 - x^2 - y^2)*(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2))^(1/2))/(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2) - (L3^2*((L2^2 + 2*L2*L3 + L3^2 - u^2 - x^2 - y^2)*(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2))^(1/2))/(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2) + (u^2*((L2^2 + 2*L2*L3 + L3^2 - u^2 - x^2 - y^2)*(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2))^(1/2))/(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2) + ((x^2 + y^2)*((L2^2 + 2*L2*L3 + L3^2 - u^2 - x^2 - y^2)*(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2))^(1/2))/(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2) + (2*L2*L3*((L2^2 + 2*L2*L3 + L3^2 - u^2 - x^2 - y^2)*(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2))^(1/2))/(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2))/(2*L2*(x^2 + y^2)^(1/2) + L2^2 - L3^2 + u^2 + x^2 + y^2));
q3 = -2*atan(((L2^2 + 2*L2*L3 + L3^2 - u^2 - x^2 - y^2)*(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2))^(1/2)/(- L2^2 + 2*L2*L3 - L3^2 + u^2 + x^2 + y^2));
end
|
如需相关资料,烦请邮箱联系。
